Con người thường sử dụng những cảm nhận về thị giác và xúc giác để cầm lấy một cái ly hoặc chọn quần áo. Đó là việc thực hiện theo thói quen hàng ngày mà không cần nhiều đến suy nghĩ. Với các con robot, tuy nhiên, các nhiệm vụ này lại khó khăn cực độ. Lượng dữ liệu thu thập qua xúc giác rất khó định lượng và thị giác lại quá khó để mô phỏng trong robot – cho tới gần đây là vậy.
“Con người nhìn vào mọi thứ, chạm vào nó. Chúng ta thường chạm vào vật để đảm bảo là chúng ta đang ở tư thế đúng để cầm lấy nó”, David Held, một trợ lý giáo sư ở trường Khoa học máy tính và phụ trách Phòng thí nghiệm Lĩnh hội và hành động Robot (R-Pad), nói. “Với chúng ta, có rất nhiều vấn đề về cảm nhận giác mà con người vẫn làm một cách tự nhiên. Chúng ta không nghĩ nhiều về nó, vì vậy chúng ta không thể nhận thức được nó đáng giá như thế nào”.
Ví dụ, để gập đồ, các con robot cần một cảm biến để bắt chước cách các ngón tay của con người cảm nhận lớp vải phía trên một cái áo sơ mi hay gấp các lớp bên dưới. Các nhà nghiên cứu có thể dạy một con robot cảm nhận được lớp phía trên của áo và cầm lấy nó nhưng không có cảm biến robot nào về các lớp khác của chiếc áo cả, robot có thể chỉ cầm được lớp trên cùng nhưng không bao giờ gập được áo thành công.
“Vậy chúng ta sẽ giải quyết vấn đề này như thế nào?”, Held đặt câu hỏi. “Tốt thôi, có thể những gì chúng ta cần là cảm biến xúc giác”.
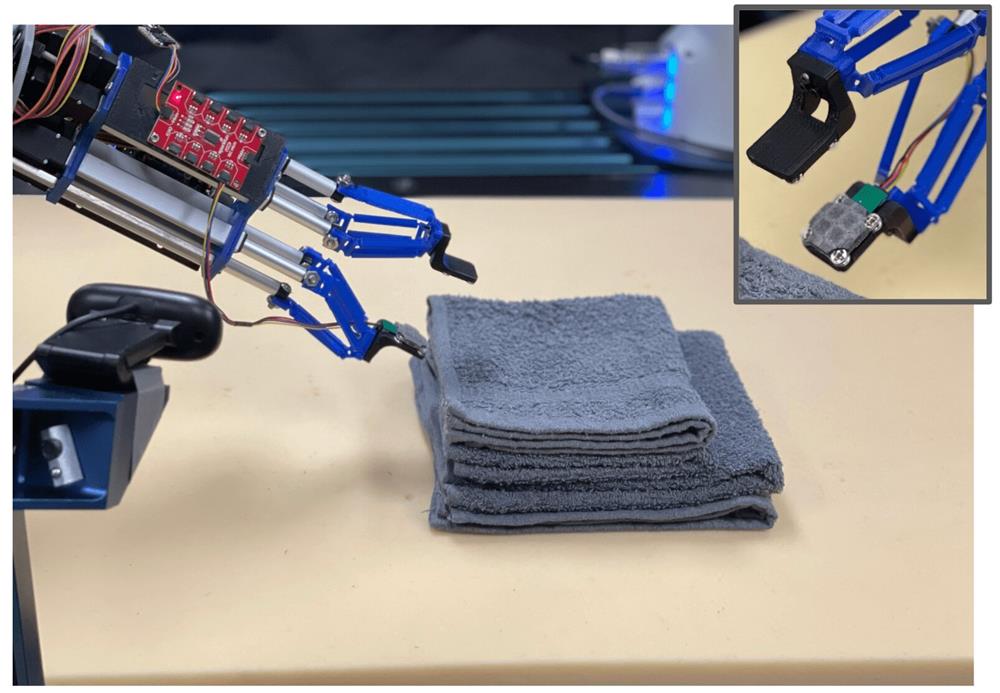
ReSkin, do các nhà nghiên cứu tại Carnegie Mellon và Meta AI phát triển, là một giải pháp lý tưởng. “Lớp da” cảm biến chạm nguồn mở này được làm từ một dạng polymer mỏng, đàn hồi cuộn lấy các hạt từ để đo đạc các tín hiệu xúc giác ba trục. Trong một bài báo gần đây, họ đã sử dụng ReSkin để giúp robot cảm nhận được các lớp quần áo hơn là phụ thuộc vào các cam biến thị giác để “nhìn” chúng.
“Bằng việc đọc những thay đổi trong từ trường từ việc nén hoặc chuyển động của lớp da, chúng tôi có thể có được cảm nhận xúc giác”, theo nhận xét của Thomas Weng, một nghiên cứu sinh ở R-Pad Lab nghiên cứu về dự án này cùng Daniel Seita – một postdoc, và học viên cao học Sashank Tirumala. “Chúng ta có thể sử dụng cảm biến xúc giác này để xác định các lớp áo chúng ta chọn bằng việc kẹp chặt cảm biến”.
Họ đã thực hiện một nghiên cứu khác, sử dụng cảm biến xúc giác để nắm lấy các vật thể cứng nhưng quần áo lại dễ bị “biến dạng”, nghĩa là nó dễ thay đổi khi được chạm vào – điều này khiến cho nhiệm vụ gập quần áo của robot trở nên khó khăn hơn nhiều. Việc hiệu chỉnh khả năng cầm nắm quần áo của robot làm thay đổi cả tư thế của nó lẫn việc đọc của cảm biến.
Các nhà nghiên cứu không dạy cho robot cách nắm hay chỗ cần nắm trên vải. Thay vào đó, họ dạy cách có bao nhiêu lớp vải được nắm trong lần ước tính đầu tiên bằng việc sử dụng các cảm biến của ReSkin, sau đó hiệu chỉnh sự cầm nắm thêm một lần nữa. Nhóm nghiên cứu đánh giá việc robot chọn cr một hoặc hai lớp quần áo và sử dụng quần áo được làm từ những loại vải và màu sắc khác nhau để có được những thông tin tổng quát nằm ngoài dữ liệu huấn luyện.
Độ mỏng nhất và linh hoạt nhất của cảm biến ReSkin có thể giúp cho việc dạy cho robot cách cầm nắm một cách gượng nhẹ các lớp quần áo. “Cảm biến này rất nhỏ nên có thể thực hiện được nhiệm vụ rất tinh thế, lựa chọn được giữa các lớp vải, điều không thể với những cảm biến khác, cụ thể là các cảm biến thị giác”, Weng nói. “Chúng tôi đã có thể đặt nó vào việc thực hiện các nhiệm vụ chưa từng làm được trước đây”.
Dẫy vậy vẫn cần phải thực hiện nhiều nghiên cứu nữa trước khi đặt giỏ quần áo vào tay một robot. Tất cả bắt đầu với các bước như làm phẳng một cái áo khô nhăn nhúm, chọn lấy số lượng các lớp vải đúng của quần áo, sau đó gập nó lại theo đúng cách. “Đó thực sự là một cuộc khám phá điều chúng tôi có thể làm với cảm biến mới”, Weng nói. “Chúng tôi đang khám phá cách đem lại cho robot cảm nhận với lớp da từ tính với những đồ mềm mại và khám phá chiến lược đơn giản để xử lý quần áo vì cuối cùng chúng tôi cần robot có thể thực hiện việc đó trên quần áo của chúng ta”.
Nhóm nghiên cứu đã trình bày bài báo “Learning to Singulate Cloth Layers Using Tactile Feedback” tại hội nghị quốc tế về Các robot và các hệ thông minh 2022 tại Kyoto, Nhật Bản vào ngày 23 đến 25/10. Công trình này đã được trao giải bài báo xuất sắc nhất tại hội nghị RoMaDO-SI 2022.
Khánh Nam